


非接触:基于激光测距原理实现机器人TCP三维坐标检测
高性能:可实现机器人TCP及绝对零位自动校准与恢复
准确性:可实现机器人TCP三维坐标准确性与重复精度测量
智能化:自动光强控制、识别运动状态,可坐标系对齐
一体化:内置工控机和触摸屏,高集成度,移动终端操控
多模式:固定安装在线实时校准/三脚架固定便携式校准

精准:基于激光测距实现工件坐标系校准,定位精度0.01mm级
紧凑:10cm小尺寸定位器,方便定位于各种用户坐标系之中
快速:无需仔细调整对齐和人工观测读数记录,自动补偿偏差
智能:自动识别反射体状态,自动实现与机器人坐标系对准
多能:既可以校准工件坐标系,也可以校准TCP,一机多用
增值:快速校准用户工件坐标系,省时省力,小投入、大产出
一体式:一体化仪器设计,节省安装空间占用,减少使用限制
准确性:基于电子触控板实现机器人三维轨迹0.01mm级检测
稳定性:标准重复次数测量(执行标准《GB/T 12642-2013》)
智能化:上电即可工作,可检测直线、圆形、多边形等轨迹
超简洁:电子触控与触摸屏操作并行设置,简介直观,方便操作
高赋能:可导出检测结果及中间点云数据,供进一步分析和挖掘

紧凑:一体化仪器设计,节省安装空间占用,减少使用限制
准确:基于激光三角测距原理,测距精度可达um级
稳定:附赠标准件,可在线适时校准,永保精度不变
智能:上电即可工作,自动光强控制,自动识别反射体状态
简洁:多段数码显示,可显示重复次数、距离值与重复精度
赋能:可导出检测结果及中间点云数据,供进一步分析和挖掘
紧凑:一体化设计,节省空间占用,无需仔细调节,方便快捷
准确:基于激光测距原理,精度可达um级,优于激光跟踪仪
规范:严格执行国家标准《GB/T 12642-2013》
智能:自动光强控制,自动识别反射体状态,无需人机联动
简洁:高亮数码显示,重复次数与重复定位精度交替显示
赋能:可导出检测结果及中间点云数据,供进一步分析和挖掘
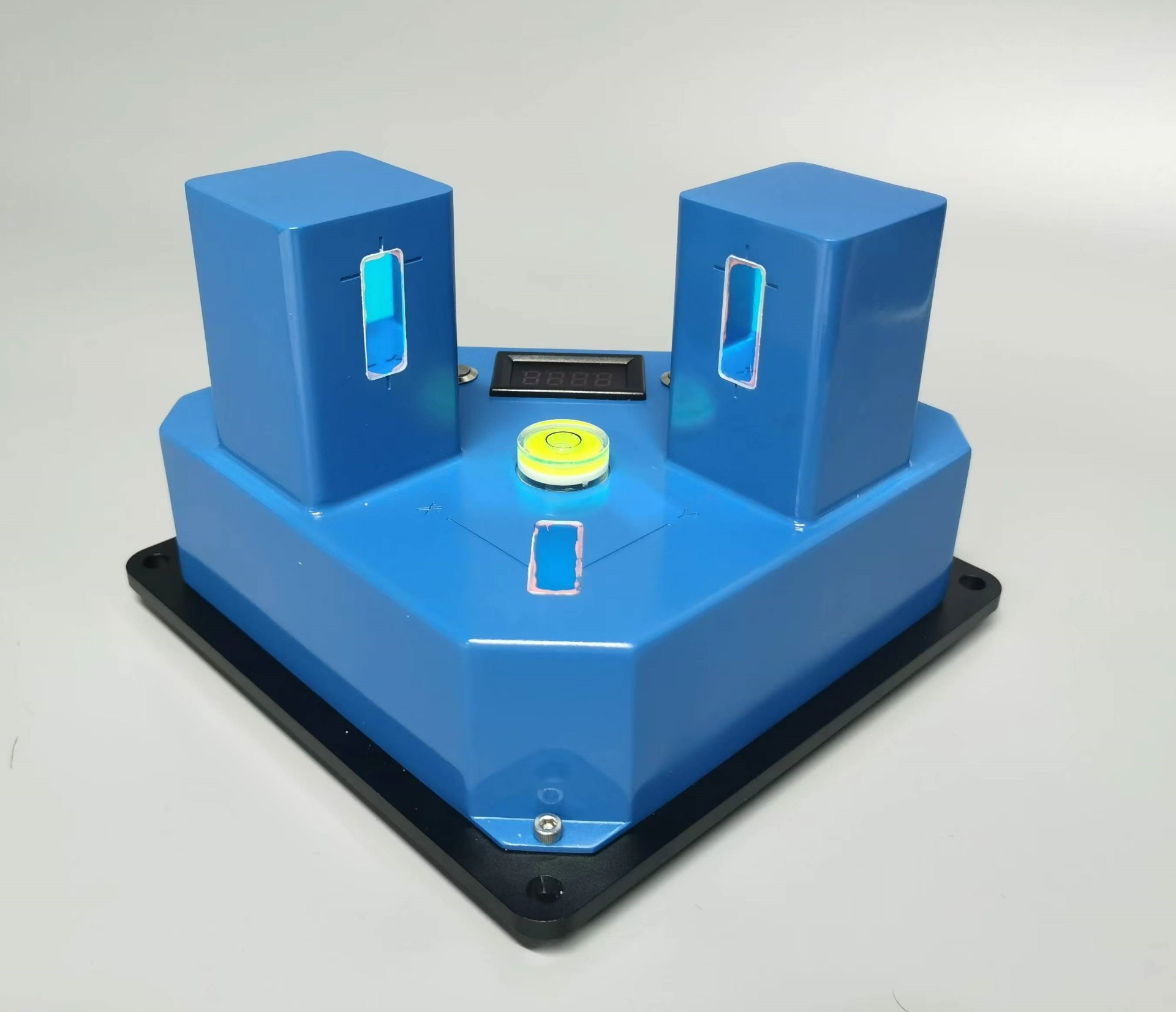
新原理:基于六正交激光位移传感器实现机器人末端6D位姿检测
多参数:6D位置与姿态的重复性、准确性;稳定时间与超调量等
高精度:普通型0.05mm,精密型0.005mm
智能化:自动判断末端状态、自动采样数据、自动处理/显示/存储
多功能:机器人末端6D位置与姿态特性测试、绝对零位校准

新原理:基于双目立体视觉原理实现机器人末端6D位姿检测
多参数:6D位置与姿态重复性、准确性;稳定时间与超调量等
智能化:自动判断末端状态、自动采样数据、自动处理/显示/存储
通用性:可检测机器人末端、工具、夹具等
多功能:机器人末端6D位置与姿态特性测试、绝对零位校准
 关注公众号
关注公众号